
 |
| Place of Origin: | Jiangsu, China (Mainland) |
| Brand Name: | Jkongmotor |
| Certification: | CE, ROHS,ISO9001 |
| Model Number: | JK20HS30-0604 |
| Minimum Order Quantity: | 3-10pcs |
|---|---|
| Price: | US$8~US$11 |
| Packaging Details: | with export carton . big quantity with pallet |
| Delivery Time: | For samples , 7-15 days / For batch , 15-25days |
| Payment Terms: | T/T , paypal , Western Union, L/C |
| Supply Ability: | 100000pcs/month |
| Shaft: | 4mm Round | Leads: | 4 |
|---|---|---|---|
| Current: | 0.6A | Holding Torque: | 180g.cm |
| Resistance: | 6.5omh | Inductance: | 1.7mH |
| High Light: | micro stepper motor,electric stepper motor |
||
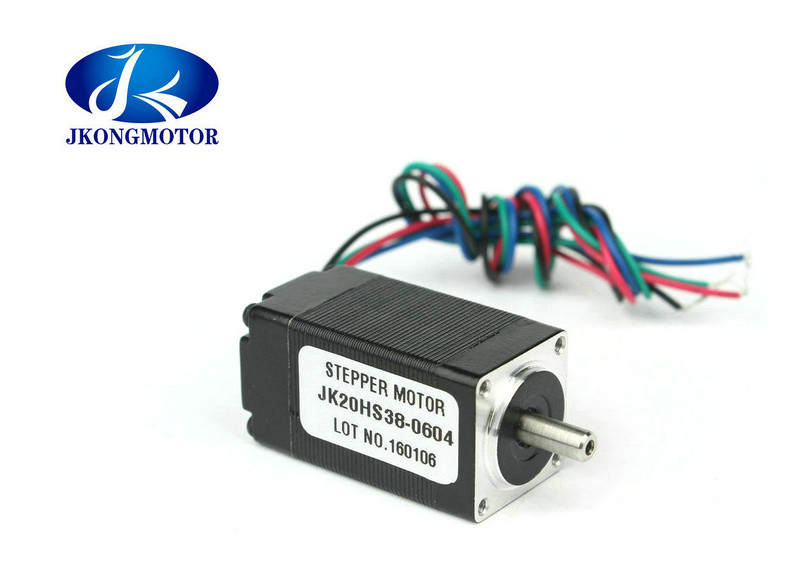
180g.Cm Torque Nema 8 Stepper Motor , 20*20*30mm 0.6A 4-wire Micro Stepper Motor
Hybrid stepper motor is a combination of variable reluctance and permanent magnet motor. The stator is electromagnetically stimulated like variable reluctance stepper motor, and the rotor of the stepper motor is axially magnetized like permanent magnet stepper motor. This stepper motor is an actuator that converts electrical pulses into angular displacement.
All motors convert electrical power, volts and amps, into mechanical power, torque and speed. The unique feature of stepper motors is that they can be very accurately controlled in terms of speed and rotation angle. Stepper motors are brushless DC motors, and as such, require an electronic driver to commutate the windings. In order to control the rotation, electrical pulses are input into the driver, and the motor rotates one step for each pulse. The excellent stability of the motor results in a simple control circuit, since the motor can be run open-loop and no feedback is required.
1. Genaral Specification:
2. Electrical Specification:
|
Model No. |
Step Angle |
Motor Length |
Current /Phase |
Resistance /Phase |
Inductance /Phase |
Holding Torque |
# of Leads |
Motor Weight |
| ( °) | (L)mm | A | Ω | mH | g.cm | No. | Kg | |
| JK20HS30-0604 | 1.8 | 30 | 0.6 | 6.5 | 1.7 | 180 | 4 | 0.06 |
3. Drawing:
![]()
![]()
![]()
![]()
Stepper Motor Advantages
Contact Person: Miss. Annie
Tel: +8615995098661
Fax: 86-519-88713769
Address: Building A2,Hutang Industrial zone,Lingdao Rd,Wujin District,Changzhou,China.Zip:213162
Factory Address:Building A2,Hutang Industrial zone,Lingdao Rd,Wujin District,Changzhou,China.Zip:213162




